


vmc1060 ફેક્ટરી મેટલ 3 એક્સિસ વર્ટિકલ સીએનસી મિલિંગ મશીન સેન્ટર
ફાયદો
1. વૈકલ્પિક CNC ટર્નટેબલ ચાર-અક્ષ અને પાંચ-અક્ષ સંકલન લિંકેજ પ્રોસેસિંગ બનાવી શકે છે.
2. આંતરિક સ્વચ્છતાને સુનિશ્ચિત કરવા માટે બેડની રચના સાથે વૈકલ્પિક સ્વચાલિત ચિપ દૂર કરવાનું ઉપકરણ;વૈકલ્પિક સ્પિન્ડલ તેલ કૂલિંગ, વગેરે.
3. સામગ્રીમાં રહેલા અવશેષ તણાવને દૂર કરવા માટે કાસ્ટિંગ બે વૃદ્ધ સારવારમાંથી પસાર થાય છે.
4. X, Y, Z-દિશા માર્ગદર્શિકાઓ તાઇવાનની હેવી-ડ્યુટી રેખીય બોલ માર્ગદર્શિકાઓ પસંદ કરી શકે છે, જેમાં ઝડપી ગતિ, ઉચ્ચ કઠોરતા વગેરેની વિશેષતાઓ છે.

સ્પષ્ટીકરણ
| વસ્તુ | VMC1060 | ||||
| વર્કટેબલનું કદ (લંબાઈ × પહોળાઈ) મીમી | 1300×600 | ||||
| ટી સ્લોટ (મીમી) | 5-18×100 | ||||
| વર્કટેબલ પર મહત્તમ લોડિંગ વજન (KG) | 650 | ||||
| X-અક્ષ યાત્રા(mm) | 1000 | ||||
| Y-અક્ષ યાત્રા(mm) | 600 | ||||
| Z-અક્ષ યાત્રા(mm) | 600 | ||||
| સ્પિન્ડલ નોઝ અને ટેબલ વચ્ચેનું અંતર(mm) | 100-700 | ||||
| સ્પિન્ડલ સેન્ટર અને કૉલમ (mm) વચ્ચેનું અંતર | 667 | ||||
| સ્પિન્ડલ ટેપર | BT40/50 | ||||
| મહત્તમસ્પિન્ડલ સ્પીડ (rpm) | 8000/10000/12000 | ||||
| સ્પિન્ડલ મોટર પાવર (Kw) | 11/15 | ||||
| ઝડપી ખોરાકની ઝડપ: X,Y,Z અક્ષ (m/min) | 16/16/16 (24/24//24 લાઇનર માર્ગદર્શિકા) | ||||
| ઝડપી કટીંગ ઝડપ (m/min) | 10 | ||||
| સ્થિતિની ચોકસાઈ (mm) | ±0.005 | ||||
| પુનરાવર્તિત સ્થિતિની ચોકસાઈ (mm) | ±0.003 | ||||
| ઓટો ટૂલ ચેન્જર પ્રકાર | 16 ટૂલ્સ હેડ ટાઇપ ટૂલ ચેન્જર (વૈકલ્પિક 24 આર્મ ટાઇપ ઓટો ટૂલ ચેન્જર) | ||||
| મહત્તમસાધનની લંબાઈ (મીમી) | 300 | ||||
| મહત્તમસાધન વ્યાસ | Φ80(સંલગ્ન સાધન)/φ150(સંલગ્ન સાધન નથી) | ||||
| મહત્તમ સાધન વજન(KG) | 8 | ||||
| ટૂલ બદલવાનો સમય (ટૂલ-ટુ-ટૂલ) સેકન્ડ | 7 | ||||
| હવાનું દબાણ (Mpa) | 0.6 | ||||
| મશીન વજન (KG) | 7500 | ||||
| એકંદર કદ(mm) | 3340*2800*2700 | ||||
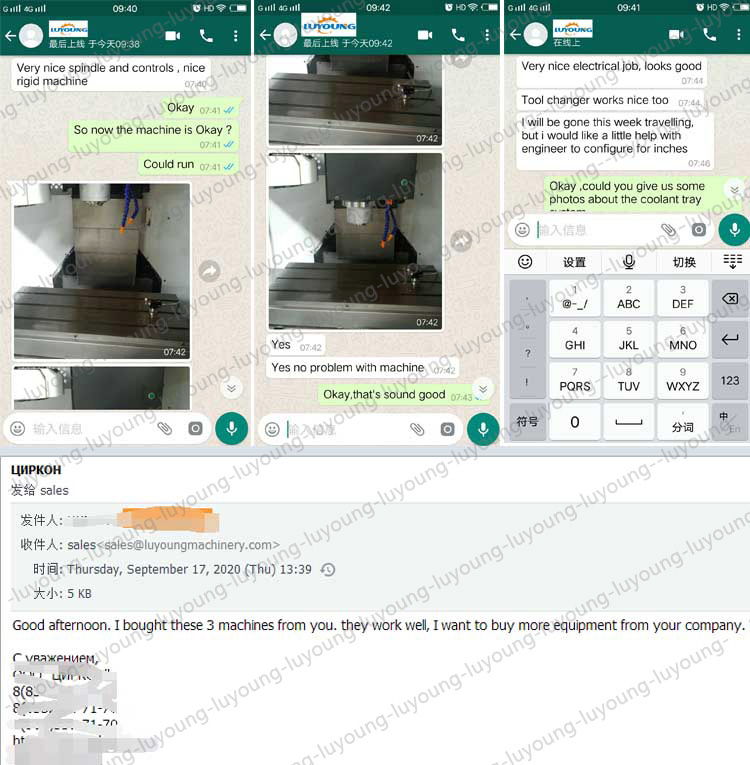
શા માટે અમને પસંદ કરો
અમને ગ્રાહકો તરફથી ઘણો સારો પ્રતિસાદ મળે છે, ઉદાહરણ તરીકે:
ખૂબ સરસ સ્પિન્ડલ અને નિયંત્રણો, સરસ કઠોર મશીન.ખૂબ સરસ ઇલેક્ટ્રિકલ જોબ, સારું લાગે છે.
ટૂલ ચેન્જર પણ સરસ કામ કરે છે.
મેં તમારી પાસેથી 3 મશીનો ખરીદ્યા છે.તેઓ સારી રીતે કામ કરે છે, હું તમારી કંપની પાસેથી વધુ સાધનો ખરીદવા માંગુ છું.
મશીન પરીક્ષણ
1. રેખીય ગતિ સ્થિતિની ચોકસાઈની તપાસ નો-લોડ શરતો હેઠળ હાથ ધરવામાં આવવી જોઈએ, અને લેસર માપન પ્રબળ રહેશે.
2. રેખીય ગતિની પુનરાવર્તિત સ્થિતિની ચોકસાઈ શોધ, તપાસ માટે વપરાતું સાધન એ જ છે જે સ્થિતિની ચોકસાઈ શોધવા માટે વપરાય છે.
3. રેખીય ગતિના મૂળના વળતરની ચોકસાઈની શોધ.
4. લીનિયર મોશનની રિવર્સ એરર ડિટેક્શન મધ્યબિંદુ અને સ્ટ્રોકના બંને છેડાની નજીક ત્રણ સ્થાનો પર ઘણી વખત (સામાન્ય રીતે 7 વખત) માપવામાં આવે છે, અને દરેક સ્થિતિનું સરેરાશ મૂલ્ય ગણવામાં આવે છે, અને પ્રાપ્ત સરેરાશ મૂલ્યનું મહત્તમ મૂલ્ય છે. વ્યસ્ત ભૂલ મૂલ્ય.






